science, religion, music, universe as well as other sources of beauty, are what we humans should look for. – zj
operational theory
a pulse of light is emitted and the precise time is recorded. the reflection of that pulse is detected and the precise time is recorded. using the constant speed of light and the delay can convert into distance, with the known position and orientation of the sensor, the xyz position of the reflective surface can be calculated.
components
laser scanner/emitter and laser detector
high-precision clock
GPS and GPS ground station
record xyz of the scannerIMU
record angular orientation of the scanner
field of view(FOV)
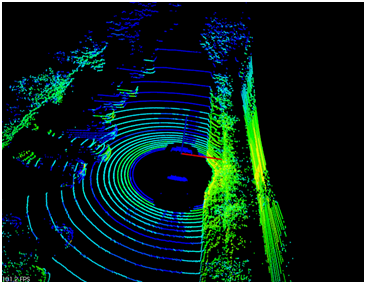
azimuth with fixed vertical angle resolution, the neighboring laser emmiter-detector pair will create concentric circle, the distance between two neighboring concentric circle will grow with the distance from detected objects to Lidar.
light source
950nm wavelength producer is Si-based, which makes it cheaper than 1550nm, the InGaAs based, making it safer to human eyes as 950nm can burn retina and powerful.
1550nm is easier to be absorbed by water than 950nm, which makes it performance better in rainy days.
the laser source emiss lines of pulse every frame, and a few photon return back to Photodetector(光电探测器), there are lots of env photons(noise), we can use narrow-band-filter to tick off some env photons, but not all of them, since the solar radiation is in the range from 905nm 50 1550nm.
solid-state
there are two ways ongoing: MEMS based, phased array tech(相位阵列). MEMS tech is using a micro scaning mirror, either rotate or vibrate to control laser direction. the drawback of micro-mirror is the in the process of relection, lots of laser energy is lost.
phased array tech(Quanergy) integerated multi micro laser emission into one socket to control laser direction. and the drawback at this moment is the short detection distance.
the traditional mechanical design Lidar(Velodye) usually has multi light emitters as well as multi corresponded light detectors. while SS-Lidar depends only on one single light emitter and the scanning mirror to control emission direction, which makes it cheaper. for example, each pair of mechanical emitter-detector cost 200 us dollar, so a 64 lines product will cost about 12800 us dollar, compared to MEMS socket about 200 us dollar each.
detection distance(dd) & angle resolution(ar)
detection distacne with 10 % reflectivity
vertical angle range(var)
vertical angle resolution(va_res)
| company | product | dd(m) | var | va_res | channels |
|---|---|---|---|---|---|
| Hesai | Pandar40 | 200 | 23° | 0.33° | 40 |
| Robo sense | RS-Lidar-32 | 200 | 40° | 0.33° | 32 |
| Velodyne | HDL-32e | 100 | 41.3° | 32 | |
| Quanergy | M8 | 150 | 20° | 32 | |
| Ibeo | NSH_32 | 80 | 16° | 0.2° | 32 |
| InnoVusion | Cheetah | 200 | 40° | 0.13° | 300 |
env effects
what about weather effects? e.g. snow, dust, rain; what about env effects? e.g. temperature, system vibration.
fusion with camera
the speed of productivization
when I first heard about InnoVusion, the founder Bao Junwei who was working at Baidu AI, then had the idea to produce Lidar around 2015, then he left Baidu and started InnoVusion, at the end of 2016, their first product Cheetah was born.
this process is really speedy, one thought is the drive force either by capital market or industry needs is becoming so fast that every good chance from idea to product is becoming shorter in time; the other thought, only these highly effective persons will survive in this fast-iteration world.
some other founders stories are here : the AI masters who left from Baidu